$44.00
On Hold
DIY Mechanical Control Robot Arm Claw Clamp Holder Gripper Grip Servo Controller
More than 10 available
Details
Shipping: US-Mainland: free (more destinations)
Condition: Brand new
*The store has not been updated recently. You may want to contact the merchant to confirm the availability of the product.







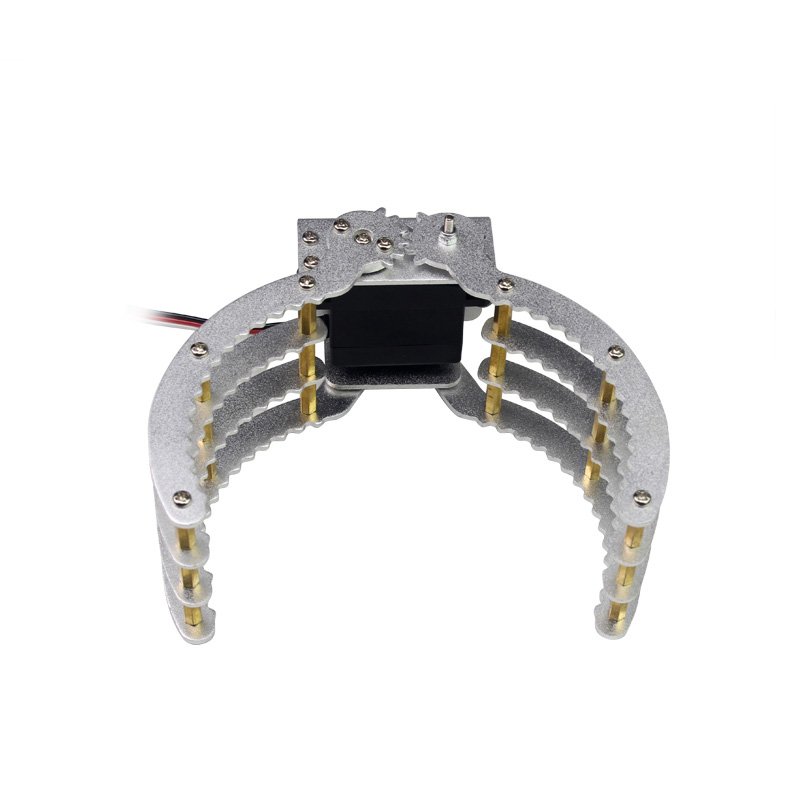
Robot Claw Clamp Holder Gripper Aluminum Alloy Arm with Servo & Servo Tester for Arduino DIY Assembled
Specification:
- Robot Claw/ Clamp Holder / Gripper
- Material: Hard aluminum alloy + copper pillar
- Weight: 123g
- Servo: LDX-335MG
- Servo torque: 19KG.cm
- Already assembled
Features:
- The inner edge of the claw like wave, more stable when clamping
- Symmetric clamping, convenient to determine the location
- M2 and M3 hole position at the end of the claw
- For DIY
Servo tester Parameter:
- Width*Length: 35*50mm
- Weight: 13.8g
Wiring method: (Either of the following way is ok)
- 7.4V lithium battery charging terminal can be directly inserted in the white terminal;
- Connect the power supply to the blue terminal , the positive voltage can be 5~8.4V .
Usage method:
- Connect the power supply to the board;
- Connect the servo to the servo interface. "+"is positive, "-" is negative, "S" is the signal terminal;
- Turning the knob, the servo will rotate synchronously;
- There is an elastic button under the knob which can switch mode;
Package List:
- 1 x Robot Claw
Specification:
- Robot Claw/ Clamp Holder / Gripper
- Material: Hard aluminum alloy + copper pillar
- Weight: 123g
- Servo: LDX-335MG
- Servo torque: 19KG.cm
- Already assembled
Features:
- The inner edge of the claw like wave, more stable when clamping
- Symmetric clamping, convenient to determine the location
- M2 and M3 hole position at the end of the claw
- For DIY
Servo tester Parameter:
- Width*Length: 35*50mm
- Weight: 13.8g
Wiring method: (Either of the following way is ok)
- 7.4V lithium battery charging terminal can be directly inserted in the white terminal;
- Connect the power supply to the blue terminal , the positive voltage can be 5~8.4V .
Usage method:
- Connect the power supply to the board;
- Connect the servo to the servo interface. "+"is positive, "-" is negative, "S" is the signal terminal;
- Turning the knob, the servo will rotate synchronously;
- There is an elastic button under the knob which can switch mode;
Package List:
- 1 x Robot Claw


 HK, NT
HK, NT{kind=link}